
ساخت ربات بالدار با قابلیت فرود روی شاخه
محققان EPFL روشی ابداع کردهاند که به یک ربات بالدار اجازه میدهد تا با استفاده از مکانیزم پنجهمانند به طور مستقل بر روی یک سطح افقی فرود بیاید.
محققان EPFL روشی ابداع کردهاند که به یک ربات بالدار اجازه میدهد تا با استفاده از مکانیزم پنجهمانند به طور مستقل بر روی یک سطح افقی فرود بیاید. این نوآوری می تواند به طور قابل توجهی دامنه وظایف با کمک ربات را گسترش دهد. نشستن پرنده بر روی شاخه باعث می شود مانور ساده ترین چیز در جهان به نظر برسد، اما در واقع، نشستن شامل تعادل بسیار ظریفی از زمان بندی، نیروهای ضربهای زیاد، سرعت و دقت است. این حرکت به قدری پیچیده است که تا کنون هیچ ربات بالداری(پرنده کوپتر) نتوانسته بر آن مسلط شود.
یکی از محققین، عضو فوق دکتری در آزمایشگاه سیستمهای هوشمند (LIS) ، اولین ارابه فرود منحصربهفردی را توصیف میکند که چنین نشستی را ممکن میسازد. او آن را با همکاری همکارانش در دانشگاه سویل، اسپانیا ساخت و آزمایش کرد، جایی که خود پرنده 700 گرمی به عنوان بخشی از پروژه اروپایی GRIFFIN توسعه یافت. "این اولین مرحله از یک پروژه بزرگتر است. هنگامی که یک پرنده کوپتر بتواند به طور مستقل بر روی شاخه درخت فرود بیاید، آنگاه این پتانسیل را دارد که وظایف خاصی را ، مانند جمع آوری بدون مزاحم نمونه های بیولوژیکی یا اندازه گیری از یک درخت را انجام دهد.. او میگوید این پرنده حتی میتوانر روی ساختارهای مصنوعی فرود بیایید، که میتواند زمینههای کاربردی بیشتری را ایجاد کند.
او میافزاید که توانایی فرود روی یک سطح میتواند راه کارآمدتری برای رباتهای پرنده- که مانند بسیاری از وسایل نقلیه هوایی بدون سرنشین (پهپادها) عمر باتری محدودی دارند- برای شارژ مجدد با استفاده از انرژی خورشیدی فراهم کند و به طور بالقوه آنها را برای مأموریتهای دوربرد ایدهآل میکند. او ادامه میدهد: «این یک گام بزرگ به سوی استفاده از روباتهای بالزن است، که از هماکنون فقط میتوانند پروازهای رایگان را برای کارهای دستکاری و دیگر برنامههای کاربردی در دنیای واقعی انجام دهند».
به حداکثر رساندن قدرت و دقت با به حداقل رساندن وزن و سرعت
مشکلات مهندسی مربوط به فرود آمدن یک پرنده کوپتر بر روی سکو بدون هیچ دستور خارجی مستلزم مدیریت بسیاری از عواملی است که طبیعت قبلاً آنها را کاملاً متعادل کرده است. پرنده کوپتر می بایست در حین نشستن به طور قابل توجهی سرعت خود را کاهش دهد، در حالی که همچنان حالت پروازی خود را حفظ میکند. پنجه باید به اندازه کافی قوی باشد تا بتواند ربات را بگیرد و وزن ربات را تحمل کند، بدون آن که آنقدر سنگین باشد که نتوان آن را بالا نگه داشت.در نهایت، این ربات نیاز دارد که بتواند محیط خود و محل فرود خود را در رابطه با موقعیت، سرعت و مسیر خود درک کند.
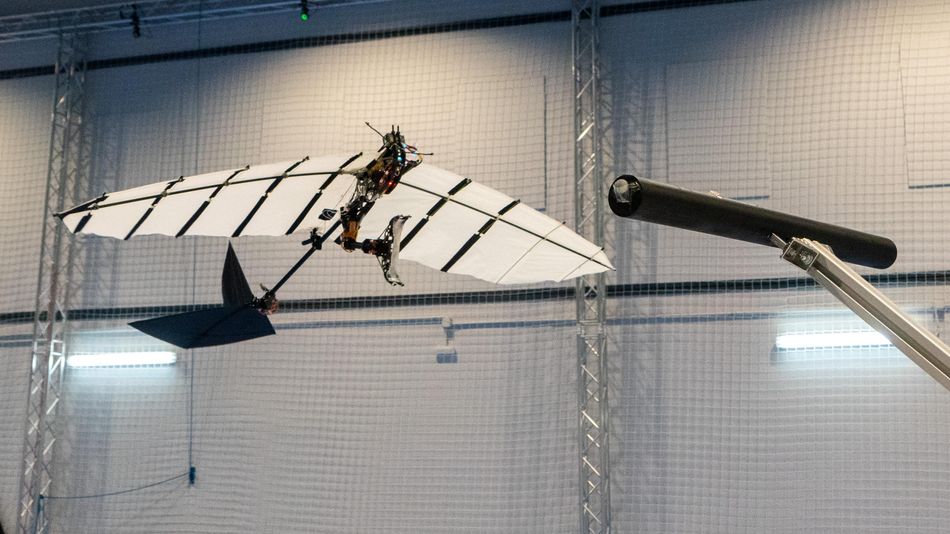
محققان با تجهیز اورنیتوپتر به یک کامپیوتر کاملاً روی برد و سیستم ناوبری، که با یک سیستم ضبط حرکت خارجی برای کمک به تعیین موقعیت خود تکمیل شده، به همه اینها دست یافتند. زائده پنجه پای پرنده کوپتر به خوبی کالیبره شده بود تا نوسانات بالا و پایین پرواز را جبران کند.خود پنجه طوری طراحی شده بود که حرکت رو به جلوی ربات را در هنگام برخورد جذب کند و به سرعت و محکم بسته شود تا وزن آن را تحمل کند. پس از نشستن، ربات بدون صرف انرژی روی صندلی باقی می ماند. با نگاهی به آینده، او از قبل به این فکر می کند که چگونه دستگاه خود را مخصوصا در یک محیط بیرونی می توان گسترش داد و بهبود بخشید؟ در حال حاضر، آزمایشهای پرواز در داخل خانه انجام میشود، زیرا آنها باید یک منطقه پروازی کنترلشده با مکانیابی دقیق از سیستم ضبط حرکت داشته باشند. در آینده، مایل هستند استقلال ربات را برای انجام وظایف نشستن و دستکاری در فضای باز و در یک محیط غیر قابل پیش بینیتر افزایش دهند.
منبع: actu
